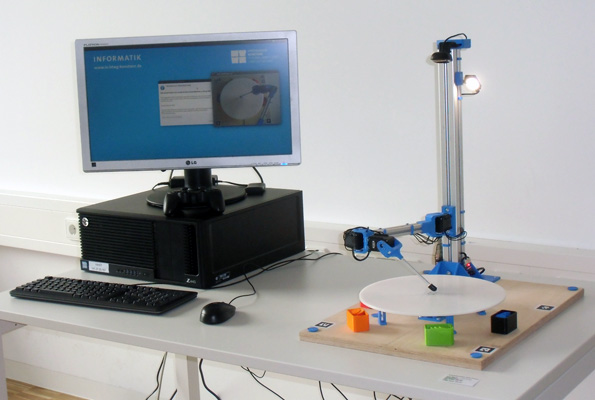
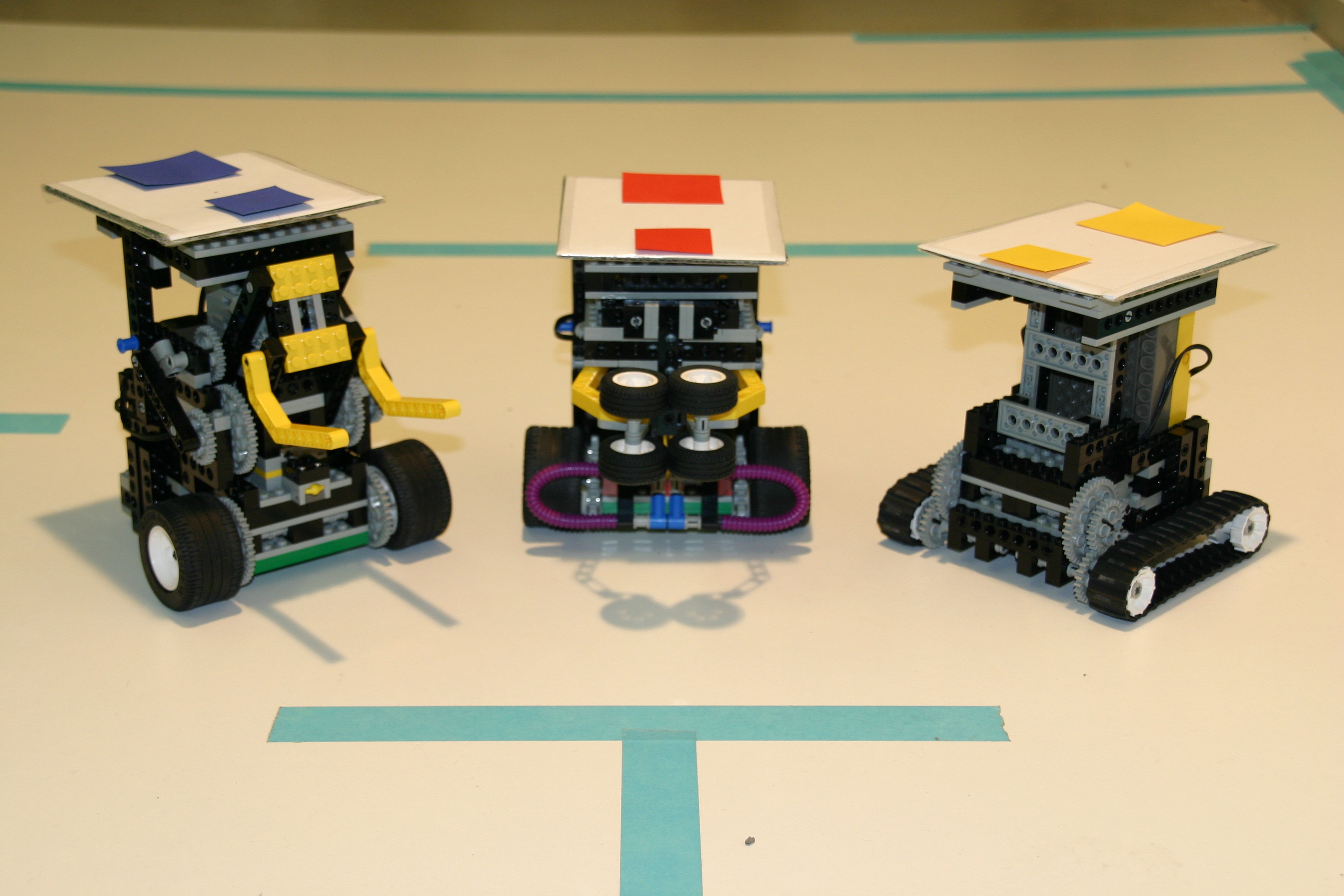
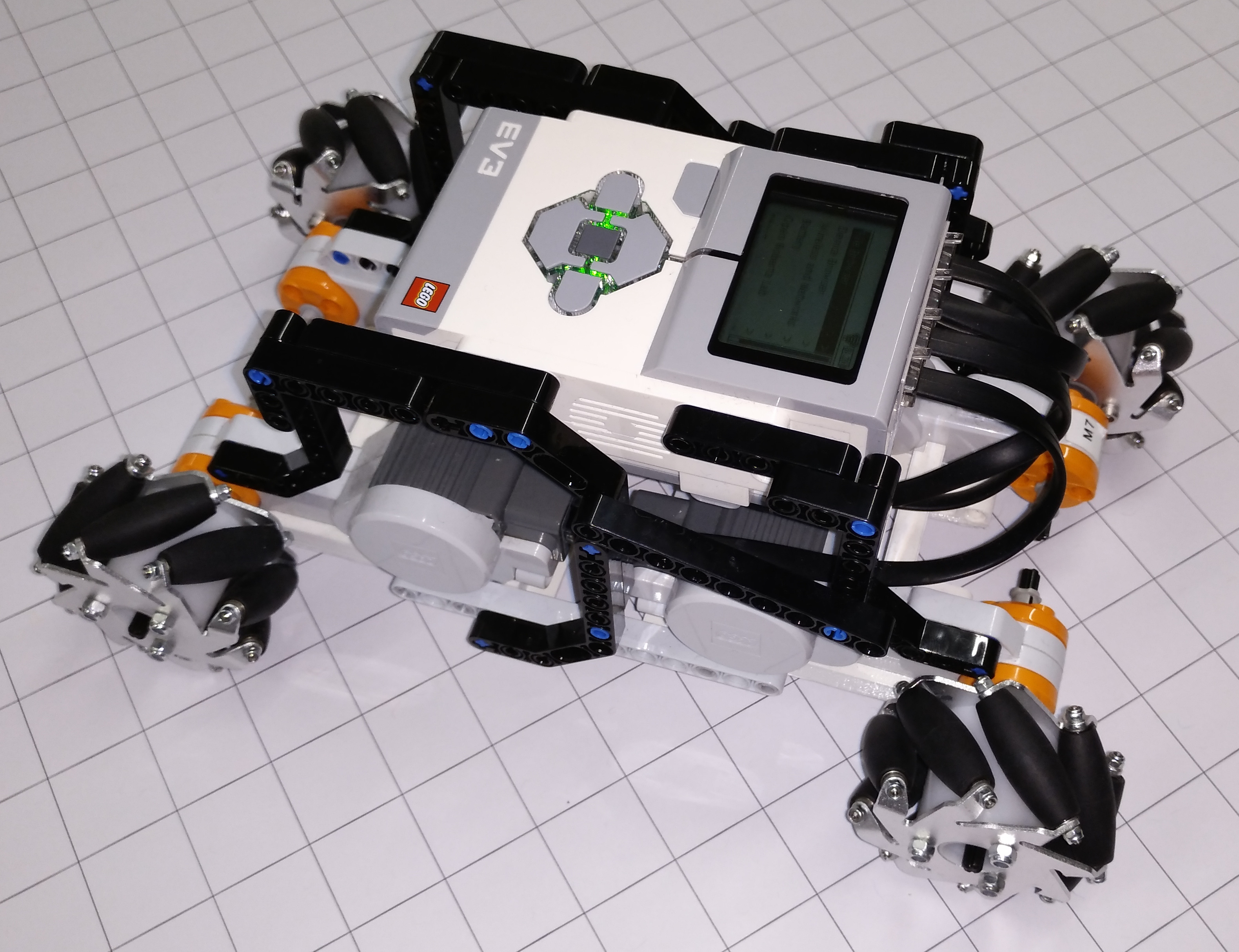
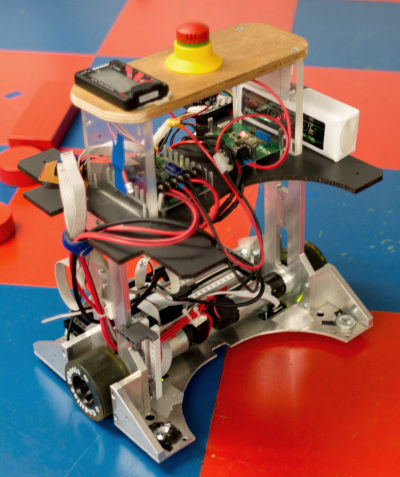
Das Labor verfügt über verschiedene mobile Roboterplattformen, die mit einer Vielzahl von Sensoren wie Laserbasierte
Abstandsmesssysteme, RGBD-Kameras, IMU-Sensoren und GPS-Module ausgestattet werden und autonom navigieren können. Die
Robotersteuerungen werden vorzugsweise mit Hilfe des
ROS-Frameworks (Robot operating system) entwickelt.
Im Labor werden studentische Projekte und Bachelor- und Masterarbeiten zu folgenden Themen durchgeführt:
Im Labor werden studentische Projekte und Bachelor- und Masterarbeiten zu folgenden Themen durchgeführt:
- 2D und 3D-Umgebungskartierung
- Selbstlokalisierung und Navigation
- Sensordatenverarbeitung und -Fusionierung
- Objekterkennung
- Roboterarm-Kinematik
- Kooperatives Verhalten