
Inhalt
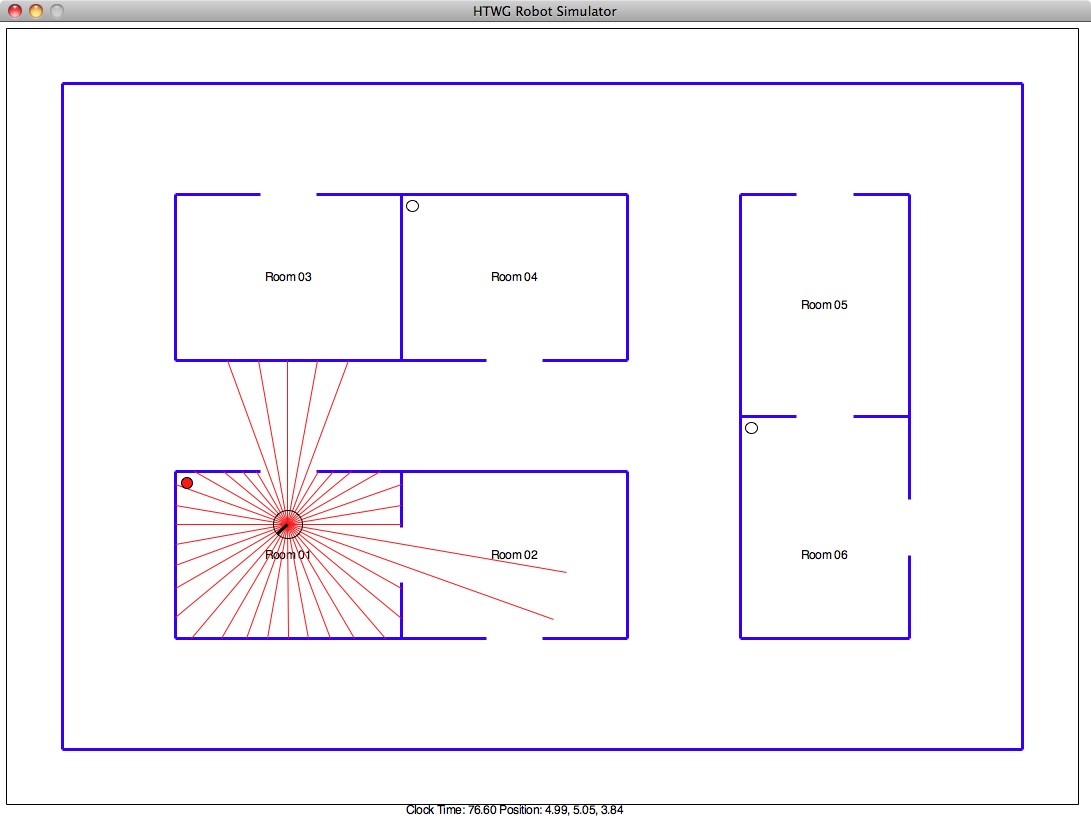
Es soll eine Steuerung für einen mobilen Indoor-Roboter entwickelt werden, der alle Räume einer Büroumgebung systematisch nach roten Bodenmarkierungen durchsucht. Der Roboter ist mit Abstandssensoren für die Navigation und mit einer Kamera zur Erkennung roter Bodenmarkierungen ausgestattet. Zusätzlich verfügt der Roboter über eine Umgebungskarte. In der Umgebung können dynamische Hindernisse (z.B. Personen) auftauchen.Es wird ein in Python geschriebener Simulator zur Verfügung gestellt. Die Steuerung ist ebenfalls in Python zu realisieren. Es müssen verschiedene Teilproblem wie Wegeplanung, Wegverfolgung mit Hindernisvermeidung und Lokalisierung gelöst werden.
Die für die Aufgabenstellung benötigten Verfahren werden in der Vorlesung besprochen. Teile der Vorlesung basieren auf den Inhalten der Bachelor-Vorlesung Einführung in die mobile Robotik