Autonomes Fahren
 Image credit: pexels
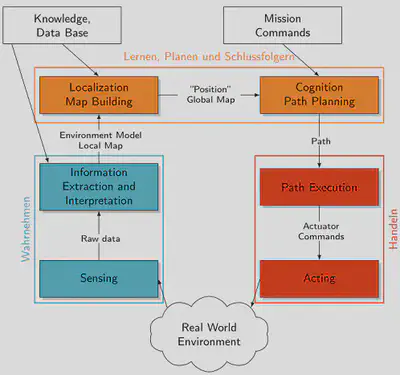
Image credit: pexelsDie Vorlesung Autonomes Fahren orientiert sich unter anderem an der vereinfachten Sense-Plan-Act Architektur. Die Studierenden erhalten dabei einen Überblick über die wichtigsten Bestandteile eines autonomen Systems.
Lern- / Qualifikationsziele
Die Studierenden
- können die zentralen Elemente eines autonomes Systems angeben sowie die Hauptaufgaben eines jeden Elementes erläutern.
- können Beispiele für Algorithmen aus der Situationsinterpretation und der Pfadplanung nennen.
- können Methoden aus der Pfadplanung implementieren.
- können sich mit Bezug auf die behandelten Methoden qualifiziert zu deren Anwendung im autonomen Fahren äußern.
Vorlesung
| # | Name | Zusammenfassung |
|---|---|---|
| 1 | Grundlagen I | Fortbewegungsmodelle, Vorwärtskinematik, Rückwärtskinematik, Ackermann Lenkung, Bewegungsmodelle |
| 2 | Grundlagen II | Grundlagen der Wahrscheinlichkeitstheorie, Erwartungswert und Varianz, Satz von Bayes, zeitdiskretes Kalman-Filter |
| 3 | Sensoren | Klassifikation von Sensoren, Abstandsmessungen, Übersicht über eine Auswahl der wichtigsten Sensoren, Einführung in Multi-Object Tracking, Assoziation von Daten |
| 4 | Lokalisierung | Übersicht über Architekturen, Kartendarstellungen, Odometrie, Lokalisierung mit Landmarken, Probabilistische Lokalisierung |
| 5 | Globale Pfadplanung | Bug Algorithmus, Konfigurationsraum, Diskretisierung Konfigurationsraum, Graphenbasierte Pfadplanung, Dijkstra’s Algorithmus, Probabilistische Pfadplanung |
| 6 | Situationsinterpretation | Physik-basierte Modelle, Manöver-basierte Modelle, Interaktions-basierte Modelle |
| 7 | Kollisionsdetektion | Analytische und Simulative Kollisionsberechnung; GJK-Algorithmus |
| 8 | Lokale Pfadplanung | Anytime Algorithmen, Interpolations-basierte Pfadglättung |
| 9 | Kooperative Manöverplanung | Einführung in die Spieltheorie, kooperative Spieltheorie |
| 10 | Trajektorienregelung | Pure Pursuit Regelung |
Übung
Die Übung baut auf der Webots Simulation Software auf. Übungstermine für das Labor werden in der Vorlesung bekannt gegeben.
| # | Name | Short Content |
|---|---|---|
| 1 | Kinematic | Umsetzung der kinematischen Gleichungen um Odometriedaten aus der Drehbewegung des differentiellen Antriebes zu genieren |
| 2 | Lokalisierung | Verwenden einer kamera-basierten Landmarkendetektion um auf Basis einer Triangulation die eigene Position zu bestimmten |
| 3 | Globale Pfadplanung | Implementierung des Bug-Algorithmus und Evaluierung in verschiedenen Umgebungen |
| 4 | Globale Pfadplanung II | Implementierung des RRT-Alorithmus |
Christopher Knievel
Professor for Autonomous Systems
My research interests include situation assessment, computational intellgience, and machine learning applied for (mobile) autonomous systems.